本平台以AI大脑为核心,以虚实融合为特色,重构智慧交通实践教学体系,推动人才培养从“交通执行者”向“智能决策者”跃升,为交通强国战略和区域智能交通产业发展提供高技能人才支撑。
一、建设背景
随着城市交通拥堵加剧、自动驾驶技术快速发展以及国家“交通强国”战略的深入实施,智能交通行业对具备人工智能、车路协同、多传感器融合感知等能力的复合型人才需求呈爆发式增长。然而,当前高校交通工程、汽车工程、人工智能等相关专业在教学实训中普遍面临真实交通场景难以复现、高危场景无法演练、路网切换成本高昂等问题。传统实训设备多为静态或半静态,难以支撑学生完成从算法开发到实车验证的完整AI闭环。因此,建设以AI大脑为核心的智慧交通实践平台,已成为推动多学科交叉融合、培养创新型技术人才的必然选择。
二、建设目的
本平台面向交通工程、汽车工程、人工智能、计算机、物联网等多专业,旨在打造集教学、实训、科研、竞赛于一体的综合性实践平台。具体目的包括:一是构建“感知→决策→控制→反馈”的完整智能闭环,以AI大脑为中控中枢,实现交通场景的全流程智能化教学;二是坚持虚实融合的设计理念,既保留真实微缩车物理特性,又结合虚拟路网快速切换能力,实现低成本、高安全、高复用的实训环境;三是打通从算法到实车的一站式开发流程,学生可在仿真环境中训练AI模型,直接部署至微缩车验证,缩短理论到实践的距离;四是服务于多学科教研、实训和竞赛工作,支撑师生在理论教学功能演示、实践教学动手操作、科技创新探索等方面的需求。
三、建设思路
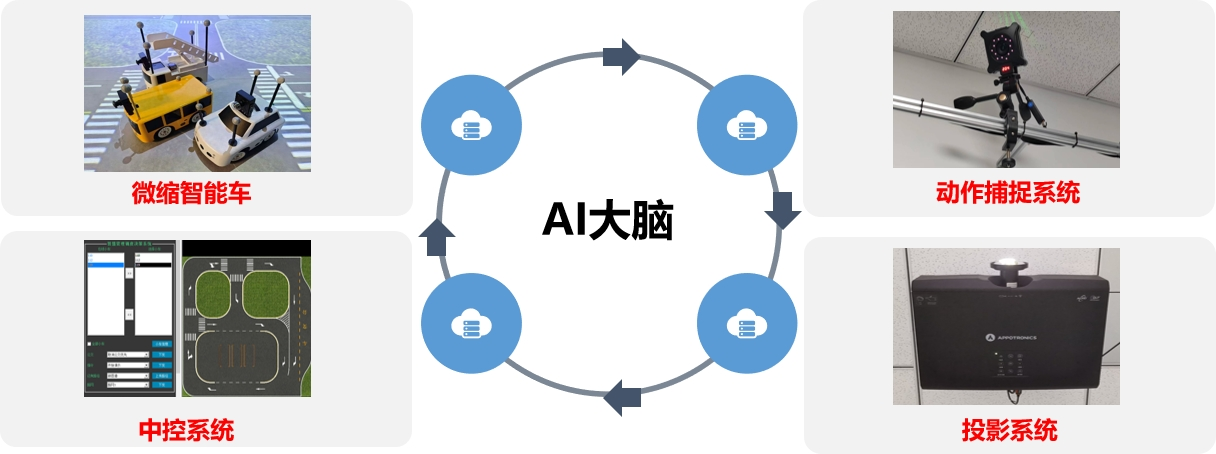
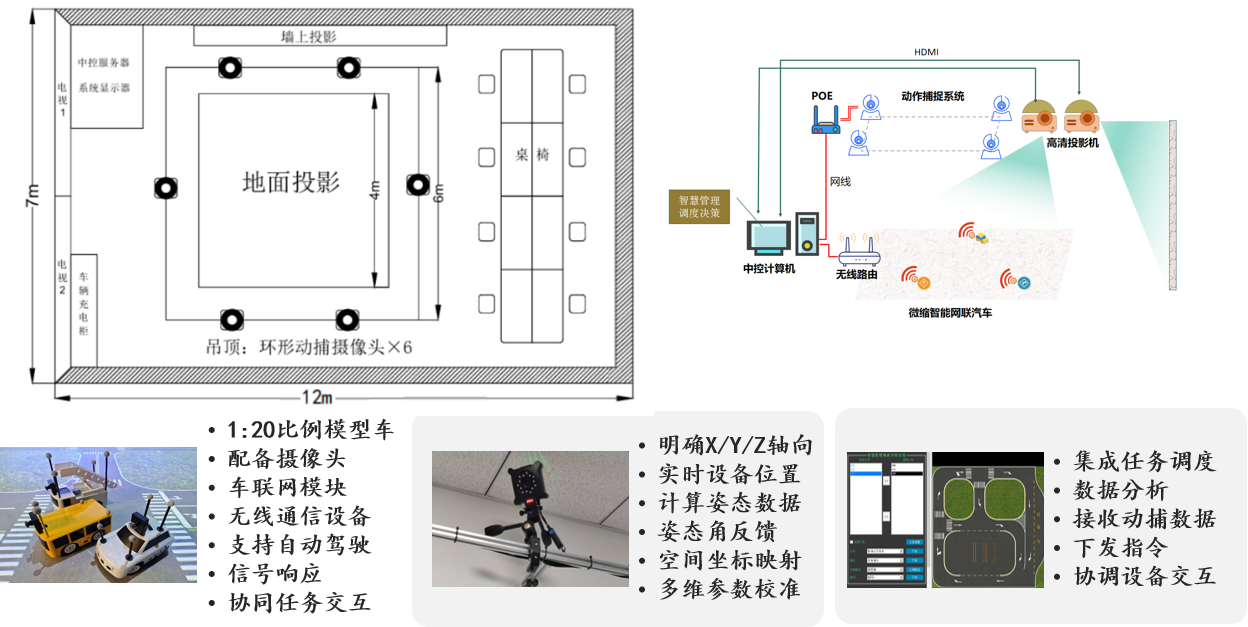
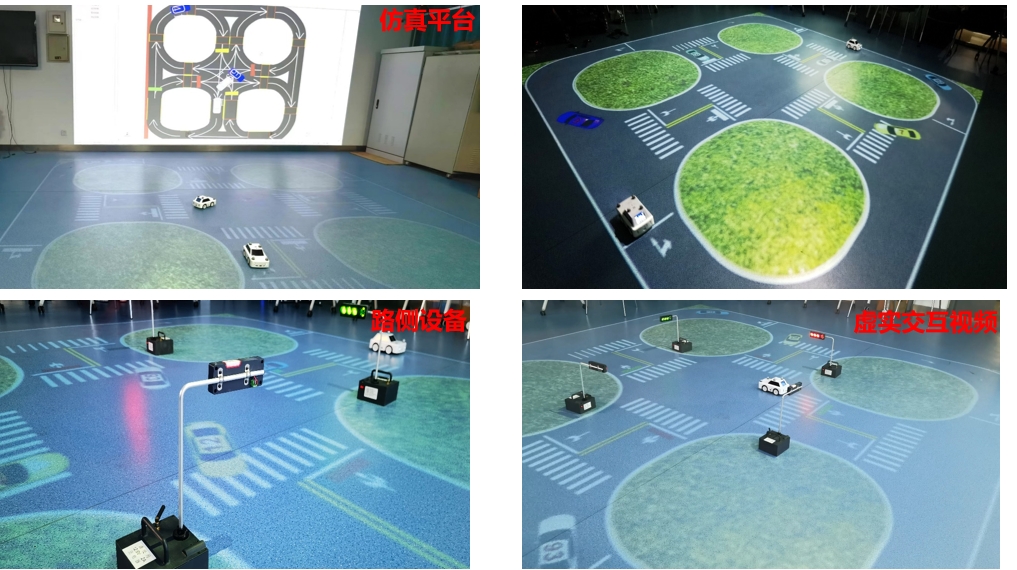
平台以“AI大脑”为中控中枢,系统布局包括环形动作捕捉系统(6个摄像头)、微缩智能车(1:20比例模型车,配备摄像头、车联网模块、无线通信设备)、中控服务器及投影可变路网系统。平台支持十字路口、环岛、停车场等多种场景的快速切换。AI在实验中的具体应用体现在三个层面:一是轨迹预测,利用LSTM/Transformer对车辆历史轨迹建模,预测行驶路径,应用于编队行驶、交叉口通行、紧急避让等场景;二是决策优化,采用深度强化学习(DQN/PPO),自主学习换道时机、跟车距离,替代传统规则控制,使车辆行为更接近真实驾驶;三是多模态融合感知,通过YOLO/ResNet等轻量化模型实时识别红绿灯、交通标志、车道线,并融合动捕位置数据与路侧单元信息,提升感知鲁棒性。学生可完成“采集数据→训练模型→部署至实车→验证效果”的完整AI开发闭环,以及“制作数据集→训练检测模型→模型剪枝/量化→部署至嵌入式平台”的完整控制逻辑实现。
四、阶段性建设成效
截至目前,平台建设已取得阶段性成效。硬件方面,已完成环形动捕系统(6个摄像头)、多台1:20比例微缩智能车、中控服务器及投影可变路网系统的部署,实验室平面布局按十字路口、环岛、停车场等场景完成功能分区。软件方面,集成了LSTM/Transformer轨迹预测模型、DQN/PPO深度强化学习决策框架以及YOLO/ResNet轻量化感知模型,实现了信号灯识别、车道线检测、车辆轨迹规划等核心功能。教学资源方面,开发了编队行驶、交叉口通行、紧急避让、信号灯识别响应等多个专项实验及综合实验案例,形成了从算法仿真到实车验证的完整教学闭环。中控系统可自动记录车辆轨迹、决策过程、感知结果,支持学生复盘与教师评价。平台已初步具备支撑交通工程类、汽车工程类、物联网类、计算机类、人工智能类等多学科教研、实训和竞赛的能力,实现了虚实融合的设计理念——既保留了真实微缩车物理特性带来的真实、全面的仿真效果,又显著发挥了虚拟路网快速切换的灵活性和适应性。
五、下一步建设计划
后续还将进一步拓展平台功能:一是增加更多微缩智能车数量,支持大规模车流协同编队实验;二是引入车路云一体化架构,实现路侧单元与云端协同决策;三是开发更多AI实训案例,涵盖恶劣天气、突发事故、特种车辆优先通行等边缘场景;四是加强与地方交通企业合作,共建实训资源库,推动产学研用深度融合。平台将持续发挥对空间要求小、快速部署、扩展性好的特点,为智慧交通领域人才培养提供有力支撑。